The following description of my job duties and responsibilities related to Digital Human Modeling efforts was taken from the golf sports science research section:
Digital Human Modeling – responsible for leading development of analytical and experimental tools for the design of golf clubs based on extensive relevant knowledge; use experience and demonstrate foresight in improving tools and processes to better understand the interaction between golfers and golf equipment; develop a unified theory of player-club interaction based upon simulations and experimental regression models; invent golf club design concepts that leverage knowledge of golfer’s individual characteristics.
The golf sports science research section provides a lot more details on the history of digital human modeling efforts and also details why and what changes were made resulting in more efficient visualization, modeling, and simulation efforts. The inverse and forward dynamics section provides much more detail on why this modeling and simulation process is so powerful, especially in virtual product development (VPD) analyses. All the information provided here is taken from presentations at conferences, technical publications, or thesis documents, as that data is all public domain and not subject to non-disclosure.
I worked at Callaway Golf for 5 years in a variety of R&D roles on the Product Player Matching initiative. I was tasked with advancing digital human swing modeling capabilities to improve R&D simulation tools to improve the scientific understanding of player-club interactions.
As Director of the Player Performance Bay at Callaway Golf, I was responsible for player performance testing and integration of experimental results with simulation tools to improve the scientific understanding of golfers and enhance performance within the rules of golf. I developed, operated, and managed the Player Performance Bay in the RCH Callaway Golf Test Center employing a number of different advanced motion tracking technologies. This included an NDI Optotrak optical tracking system, Polhemus electromagnetic system, an interchangeable on-board diagnostic (OBD) MEMS-based inertial sensor tracking system. We used the NDI Optotrak system with a very thorough subject calibration process as input data for dynamic swing model.
The NDI Optotrak system included a custom marker interface that used 72 markers on 14 separate detachable curved carbon fiber plates for measuring motions of the different body segments (2 feet, 2 lower shanks, 2 upper legs, 1 pelvis, 1 mid back, 1 upper torso, 2 shoulders, 2 forearms, 1 head). The plates included marker clustering techniques to improve the accuracy of the measured 6 DOF rigid body pose estimation placed on each body segment of interest.  The plates were designed such that data occlusions were minimized with the 3 NDI Optotrak cameras.
The plates were designed such that data occlusions were minimized with the 3 NDI Optotrak cameras.  There was also a separate custom designed 14 marker club prong for installing on any club during the swing session.
There was also a separate custom designed 14 marker club prong for installing on any club during the swing session.

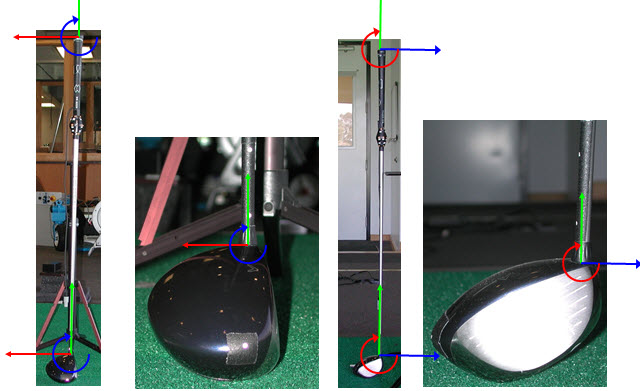
 A key part of the motion capture process was subject calibration. For every subject, we implemented a digitizing procedure where we digitized bony landmarks relative to the body segment of interest. That allowed us to transform the measured 6 DOF rigid body information to the estimated joint center using custom written algorithms in Matlab. This also allowed us to scale the digital human appropriately for modeling purposes. The figure below shows digitizing wrist bony landmarks relative to the shaft prong on the club. The digitizing probe had 6 markers on the probe that were picked up by the cameras for subject calibration.
A key part of the motion capture process was subject calibration. For every subject, we implemented a digitizing procedure where we digitized bony landmarks relative to the body segment of interest. That allowed us to transform the measured 6 DOF rigid body information to the estimated joint center using custom written algorithms in Matlab. This also allowed us to scale the digital human appropriately for modeling purposes. The figure below shows digitizing wrist bony landmarks relative to the shaft prong on the club. The digitizing probe had 6 markers on the probe that were picked up by the cameras for subject calibration.

The Optotrak software did not provide any real-time visualization capabilities. Rather, each of the 14 body segments were shown on the display with all of the markers from the associate carbon composite plate along with the estimated rigid body pose calculated from the markers for each plate. The shaft markers and rigid body were also displayed. An example of the setup position is shown below.  The Optotrak marker output data is given in 3D position and quaternion orientation format. The motion capture output data was post-processed using custom Matlab algorithms to perform the following steps:
The Optotrak marker output data is given in 3D position and quaternion orientation format. The motion capture output data was post-processed using custom Matlab algorithms to perform the following steps:
- Convert quaternion orientation data to direction cosine matrix.
- Interpolate missing data using a cubic spline with nonlinear least squares fit for orientation data.
- Transform rigid body data from the measured plate location to the estimated joint center position using the player calibration file.
- Assemble wrist (hand) data to forearm segments using the shaft marker and wrist bony landmarks digitization file.
- Automatic filtering routine with cutoff frequency determined by residual analysis and 4th or 8th order butterworth filter.
Once the motion capture data was post-processed it was ready for digital swing modeling efforts. Initial dynamic swing modeling was performed with an external consultant using ADAMS FigMOD, which later became LifeMOD.
However, there were a number of issues with the format of this program:
- The cost was extremely high because of the software used, which was $40,000 for the ADAMS License and another $30,000 for the FigMOD license. While very powerful, it was not a great choice for the proof of concept work that was being done. Even if it was successful, it could never be implemented in an in-house design program because of the cost constraints.
- Using an external consultant we were always dependent on their time constraints. While they did a very good job and provided good results, it was difficult to coordinate the program management of all of the synergistic studies tied to Player Product Matching initiatives.
- The biggest issue I had was how they would handle the motion capture data. Their process treated the data as motion influencing; I wanted the data treated as motion governing. We were going through tremendous efforts in subject setup and calibration to provide individual motion outputs to feed into a custom dynamic swing model. I wanted to have high correlation coefficients between measured 3D rotations and the simulated output 3D rotations. This was not possible based on their implementation.


{kind=link}
{kind=link}
As outlined in the golf sports science research section, the dynamic swing modeling efforts were brought back in-house. The dynamic swing modeling plans were central to the Product Player Matching initiative as outlined below. 
The goal of the dynamic swing model was to create a modeling and simulation tool that could swing the same every time, like a human robot, for any desired swing profile so that parametric changes in club properties could be examined by analyzing the resultant motion changes (speeds and orientations) of the club head at impact. How did I accomplish that? Through a well designed VPD biomechanical swing model. The details of the inverse and forward dynamics modeling techniques are provided in the dynamic swing model development post.

Player profiling studies were used with instrumented clubs to measure and analyze swing profiles across all types of golfers – high swing speeds to low swing speeds, high closure rate swings to low closure rate swings, low handicappers to high handicappers. From these studies, swing profiles were created based on closure rates (how fast or slow the club head was closed during the downswing) and release rates (essentially how fast the swing speed was based on wrist release/hinge angles. From these profiles, characteristic dynamic swing models were created that best approximated these swing profiles. Motion capture studies were performed to ultimately create a forward dynamic swing model for that swing profile. The motion capture data was used in the inverse dynamics process to determine the joint torques/forces; the inverse dynamics outputs were then used as the inputs to the forward dynamics model to predict resultant motions. Was it successful? Correlation coefficients between 0.95 – 0.99 between the measured experimental data and the simulated output joint angular time histories for all model DOF.
Using the desired swing profile, club properties could be parametrically analyzed to see the effect on resultant club head motion. If weight is moved in the clubhead to the rear, what is the resultant change of the club head at impact? Does it loft more and what happens to the swing speed? If weight is moved to the heel of the club, is the club more open or more closed at impact for different swing profiles? How does the weight of the shaft effect the club head orientations at impact for any swing profile? Using the exact same swing, what are the orientation changes in the club head at impact between a 3 wood and 3 iron? Even player effects can be analyzed. If we increase the torque of the torso relative to the hips (increased X-Factor), what happens to the swing speed at impact? All of these scenarios can be run on a computer without any human subject testing necessary. And it can be run all day long. That is the power of forward dynamics modeling.